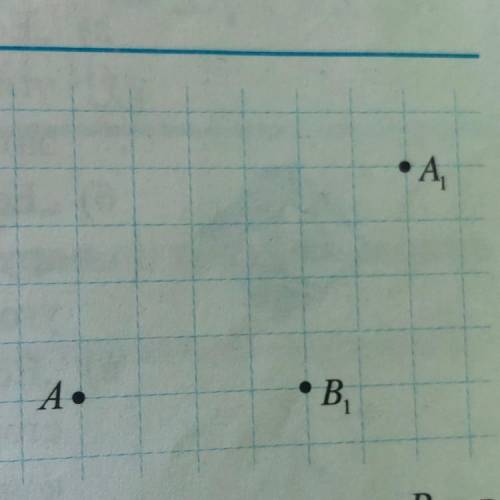
Точка А, изображенная на рисунке является вершиной треугольника ABC, а Точки А1 и В1 - середины сторон ВС и АС этого треугольника. Перечертите рисунок и восстановите треугольник АВС.
При угрозе теракта всегда контролируйте ситуацию вокруг себя, особенно, когда находитесь на объектах транспорта, культурно-развлекательных, спортивных и торговых центрах. при обнаружении забытых вещей, не трогая их, сообщите об этом водителю, сотрудникам объекта, службы безопасности, органов полиции. не пытайтесь заглянуть внутрь подозрительного пакета, коробки, иного предмета. не подбирайте бесхозных вещей, как бы привлекательно они не выглядели. в них могут быть закамуфлированы взрывные устройства (в банках из-под пива, сотовых телефонах и т. не пинайте на улице предметы, лежащие на земле. если вдруг началась активизация сил безопасности и правоохранительных органов, не проявляйте любопытства, идите в другую сторону, но не бегом, чтобы вас не приняли за противника. при взрыве или начале стрельбы немедленно падайте на землю, лучше под прикрытие (бордюр, торговую палатку, машину и т. для большей безопасности накройте голову руками. случайно узнав о готовящемся теракте, немедленно сообщите об этом в правоохранительные органы. если вам стало известно о готовящемся или совершенном преступлении, немедленно сообщите об этом в органы фсб или мвд.
1кинематика изучает, как движется тело, но не изучает, почему тело движется так, а не иначе. 3 уравнение движения частицы представляет собой уравнение в левой части которого стоит ускорение пробной частицы умноженное на массу частицы (в данном случае это инертная масса) , в правой части уравнения стоит гравитационная сила. гравитационная сила, в свою очередь, представляет из себя произведение масс 4 * аффинная (косоугольная) система координат * барицентрические координаты * биангулярные координаты * биполярные координаты * бицентрические координаты * бицилиндрические координаты * конические координаты * координаты риндлера — в пространстве минковского * параболические координаты * полярная система координат * проективные координаты * прямоугольная (декартова) система координат * сферическая система координат * тороидальная система координат * трилинейные координаты * цилиндрическая система координат * цилиндрические параболические координаты * эллипсоидальные координаты (эллиптические координаты) 5 число степеней свободы определяет минимальное количество независимых переменных (обобщённых координат) , необходимых для полного описания движения. обобщенные координаты-независимые между собой параметры qi (i=1, 2, ..s) любой размерности, число s которых равно числу степеней свободымеханической системы и которые однозначно определяют положение системы впространстве. 7 основными кинематическими характеристиками движущейся точки являются её скорость и ускорение 8 при движении тела по окружности мгновенную скорость называют линейной скоростью. линейная скорость тела, равномерно движущегося по окружности, оставаясь постоянной по модулю, меняется по направлению и в любой точке направлена по касательной к траектории. модуль линейной скорости можно определить по формуле: v = . пусть тело, двигаясь по окружности радиусом r, совершило один полный оборот, тогда пройденный им путь равен длине окружности: l = 2pr, а время равно периоду обращения t 9 тангенциальное ускорение характеризует быстроту изменения скорости движения по численному значению и направлена по касательной к траектории. нормальное ускорение характеризует быстроту изменения скорости по направлению 10 угловой скоростью называют величину, равную отношению угла поворота радиуса-вектора к промежутку времени, за которое этот поворот произошел. углово́е ускоре́ние — псевдовекторная величина, характеризующая быстроту изменения угловой скорости твёрдого тела угол поворота в современной , как величина, только оценивается в единицах плоского угла. для определения же значения плоского угла φ пользуются уравнениями, принятыми в . это либо уравнение φ = s/r 11 ответ. v=w*r; w=2*pi*n; at=e*r; an=(w^2)*r=(v^2)/r=w*v; s(t)=s0+v0*t+0,5*a*t^2; u(t)=u0+w0*t+0,5*e*t^2; v(t)=v0+a*t; w(t)=w0+e*t;
0,0(0 оценок)
Полный доступ
Позволит учиться лучше и быстрее. Неограниченный доступ к базе и ответам от экспертов и ai-bota
Оформи подписку