Эхолокация может быть основана на отражении сигналов различной частоты — радиоволн, ультразвука и звука. Первые эхолокационные системы направляли сигнал в определённую точку и по задержке ответа определяли её удалённость при известной скорости перемещения данного сигнала в данной среде и препятствия, до которого измеряется расстояние, отражать данный вид сигнала. Обследование участка дна таким образом при звука занимало значительное время.
Сейчас используются различные технические решения с одновременным использованием сигналов различной частоты, которые позволяют существенно ускорить процесс эхолокации.
Объяснение:
Дано:
H = 3 м
L = 5 м
s - ?
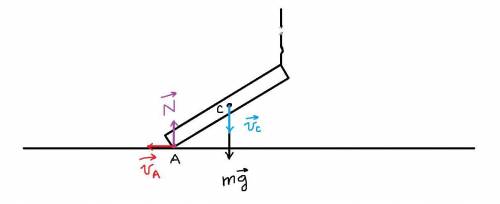
Здесь нужно помнить, что сила тяжести таких тел, как идеальный стержень, идеальная труба, идеальная симметричная лестница и т.д., и т.п... приложена к их центру.
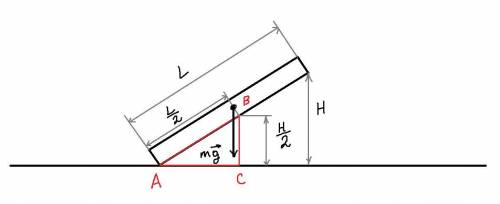
Силы трения, понятное дело, не действуют, раз поверхность гладкая. После того, как верёвка оборвётся, на трубу будут действовать только сила тяжести mg и сила реакции поверхности N, которая всё время будет направлена перпендикулярно поверхности. Горизонтальных сил нет, поэтому центр тяжести трубы С начинает двигаться вниз, не меняя своей координаты по оси Х. А конец трубы А - двигаться влево. В общем-то, для решения задачи нам достаточно того факта, что центр тяжести трубы движется вертикально. На сколько сдвинется нижний её конец - это можно понять из треугольника АBC:
AB = L/2
BC = H/2
AC найдём по теореме Пифагора:
АС = √(AB² - BC²) = √(L²/4 - H²/4) = √(L² - H²)/2
Когда труба упадёт, она будет лежать ровно. Разность половины её длины и длины катета AC - это и будет тем расстоянием, на которое нижний конец трубы сдвинется:
s = AB - AC = L/2 - √(L² - H²)/2 = 5/2 - √(25 - 9)/2 = 2,5 - √16/2 = 2,5 - 4/2 = 2,5 - 2 = 0,5 м
ответ: 0,5 м.