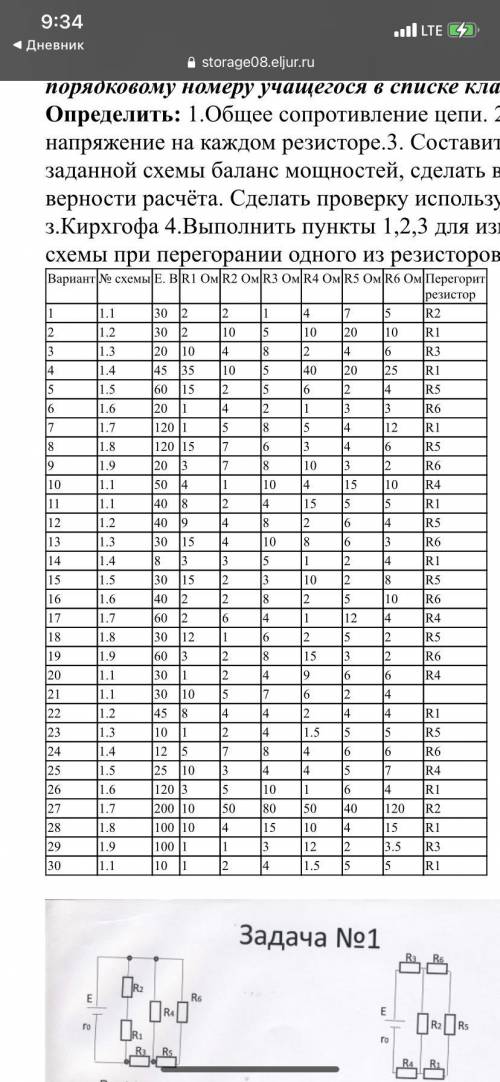
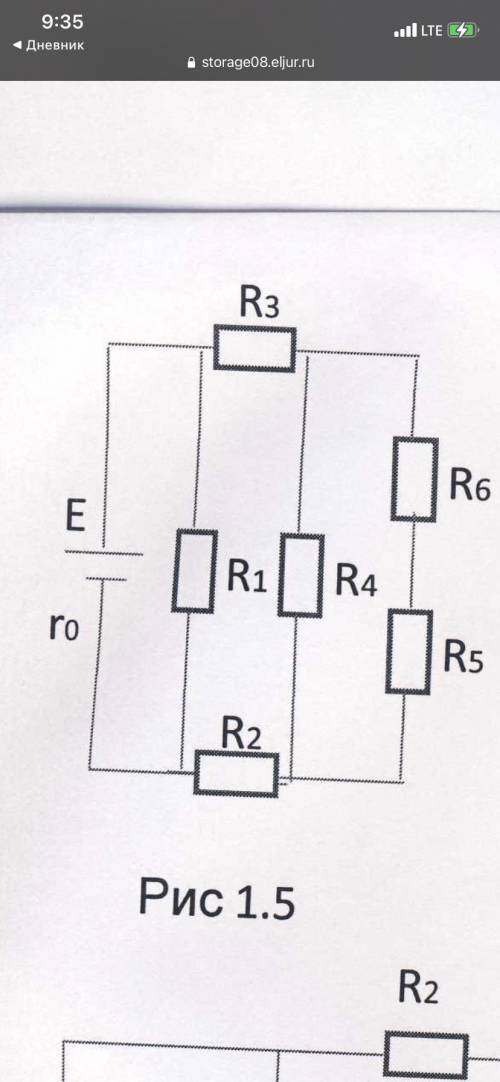
Дано: Для цепи постоянного тока, изображенной на рис. 1.1 – 1.9.Заданы величины сопротивлений и величина ЭДС указанные в таблице. Номер варианта соответствует порядковому номеру учащегося в списке класса! Определить: 1.Общее сопротивление цепи. 2.Ток и напряжение на каждом резисторе.3. Составить для заданной схемы баланс мощностей, сделать вывод о верности расчёта. Сделать проверку используя з.Кирхгофа 4.Выполнить пункты 1,2,3 для изменённой схемы при перегорании одного из резисторов. Вариант 15
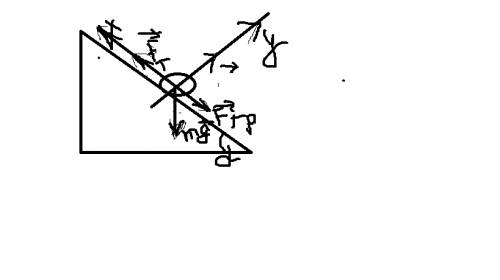
Тут без чертежа никак: рисуем наклонную плоскость, на ней тело и расставляем силы: сила тяги вдоль наклонной плоскости вверх, сила трения вдоль плоскости, но вниз, сила тяжести приложена к центру масс тела и направлена ВЕРТИКАЛЬНО вниз, сила реакции опоры приложена к центру масс тела но ВДОЛЬ ПЕРПЕНДИКУЛЯРА К НАКЛОННОЙ ПЛОСКОСТИ. ось ОХ направляем вдоль наклонной плоскости вверх, ось ОУ вдоль вектора силы реакции опоры вверх, угол α=30 угол у основания наклонной плоскости. Теперь нам надо записать 2 закон Ньютона в векторном виде: → → → → → → Fтяг+Fтр+mg+N=ma, теперь нам надо найти проекции этих сил на координатные оси ОХ: Fтяг-Fтр - mg sinα=ma (сила трения имеет отрицательную проекцию, тк. она направлена "против" оси ОХ, mg отрицательна т.к. идем от начала проекции к концу против направления оси, а если опустить перпендикуляр из конца вектора на ОХ то получим, что угол 30 будет лежать напротив проекции, т.е сам вектор при этом будет равен mg sinα) Теперь аналогично находим проекции всех векторов на ОУ: 0+0-mg cosα+N=0 отсюда находим, что N=mg cosα, вспоминаем, что Fтр=μN=μ mg cosα, осталось все собрать в кучу, получаем: Fтяг- μ mg cosα - mg sinα=ma отсюда a=(Fтяг -μ mg cosα -mg sinα)/m=(7000-0,1*1000*10*√3/2 - 1000*10*1/2)/1000=(6150-5000)/1000=1150/1000=1,15 м/с.кв.
Рассмотрим твердое тело, как некую систему (рис. 6.1), состоящую из n точек (m1, m2, ..., mn); – радиус-вектор i-й точки, проведенный из точки О – центра неподвижной инерциальной системы отсчета. Введем обозначения: – внешняя сила, действующая на i-ю точку, – сила действия со стороны k-й точки на i-ю. Рис. 6.1 Запишем основное уравнение динамики для точки (см. п. 3.6):Умножим обе части этого уравнения векторно на :Знак производной можно вынести за знак векторного произведения (и знак суммы тоже), тогда Векторное произведение вектора точки на её импульс называется моментом импульса (количества движения) этой точки относительно точки О. . (6.1.1) Эти три вектора образуют правую тройку векторов, связанных «правилом буравчика» (рис. 6.2). Рис. 6.2 Векторное произведение , проведенного в точку приложения силы, на эту силу, называется моментом силы : . (6.1.2) Обозначим Li – плечо силы Fi, (рис. 6.3). Учитывая тригонометрическое тождество, получаем . (6.1.3) Рис. 6.3C учетом новых обозначений: . (6.1.4) Запишем систему n уравнений для всех точек системы и сложим их левые и правые части:Здесь сумма производных равна производной суммы:где – момент импульса системы, – результирующий момент всех внешних сил относительно точки О. Так как, то Отсюда получим основной закон динамики вращательного движения твердого тела, вращающегося вокруг точки. . (6.1.5) Момент импульса системы является основной динамической характеристикой вращающегося тела. Сравнивая это уравнение с основным уравнением динамики поступательного движения (3.6.1), мы видим их внешнее сходство.
0,0(0 оценок)
Полный доступ
Позволит учиться лучше и быстрее. Неограниченный доступ к базе и ответам от экспертов и ai-bota
Оформи подписку