Система отсчета – совокупность системы координат и часов, связанных с телом, относительно которого изучается движение.
Движения тела, как и материи, вообще не может быть вне времени и пространства. Материя, пространство и время неразрывно связаны между собой (нет пространства без материи и времени, и наоборот).
Пространство трехмерно, поэтому «естественной» системой координат является декартова прямоугольная система координат, которой мы, в основном, и будем пользоваться.
В декартовой системе координат, используемой наиболее часто, положение точки А в данный момент времени по отношению к этой системе характеризуется тремя координатами x, y, z или радиус-вектором , проведенным из начала координат в данную точку (рис.2.1).
Рис. 2.1
При движении материальной точки её координаты с течением времени изменяются. В общем случае её движение определяется скалярными уравнениями:
x = x (t), y = y (t), z = z (t). (2.2.1)
Эти уравнения эквивалентны векторному уравнению
r = r(t) = x i + y j + z k (2.2.2)
где х, у, z – проекции радиус-вектора на оси координат; i, j, k – единичные векторы (орты), направленные по соответствующим осям.
Уравнения (2.2.1) и (2.2.2) называются кинематическими уравнениями движения материальной точки.
Число независимых координат, полностью определяющих положение точки в пространстве, называется числом степеней свободы.
Если материальная точка движется в пространстве, то она имеет три степени свободы (координаты х, у, z). Если она движется на плоскости – две степени свободы. Если вдоль линии – одна степень свободы.
Всякое движение тела можно разложить на два основных вида движения – поступательное и вращательное.
Объяснение:
из призентаций
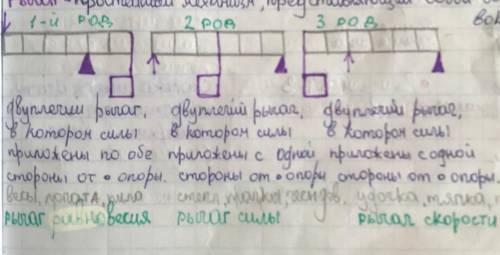
1-устройство,в которых работа совершается только за счёт механической энергии преобразующее направления и величины(модуль)силы
2- для того, чтобы получить выигрыш в силе, то есть увеличить силу, действующую на тело, в несколько раз.
3-простейший механизм, представляющий собой балку, вращающуюся вокруг точки опоры.
4-(прикрепила файл)
5- Плечо силы-кратчайшее расстояние от линии действия силы до оси вращения.
d или L
Нужно момент силы разделить на силу
6-значение сил действующих на него обратно пропорционально длинам плеч этих сил
7-что меньшей силой можно уравновесить большую с рычага.
8-весы,лопата,пила,степлер,тачка,чеснокодавилка,удочка,тяпка
9-момент силы-M
физическая величина,равная произведению силы,действующие на тело,на плечо этой силы
M=F*d
условные единицы[1H*1m]
10-рычаг находится в равновесии под действием двух сил,если момент силы вращающий его по ходу часовой стрелки,равен моменту силы,вращающей его против часовой.
Объяснение: